
|
Productdetails:
|
| Gewicht: | 507g | ||
|---|---|---|---|
| Markeren: | Veelzijdige Zachte Roboticatang,1920g Tang van de ladings de Zachte Robotica,1920g Tang van de ladings de Zachte Robot |
||
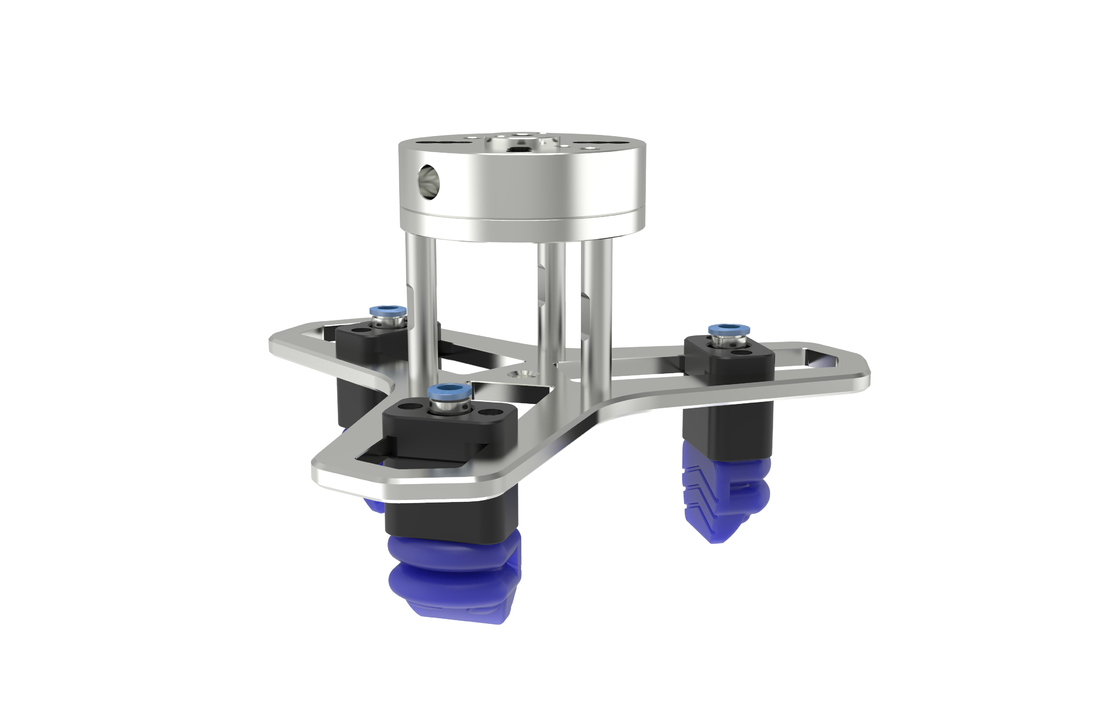
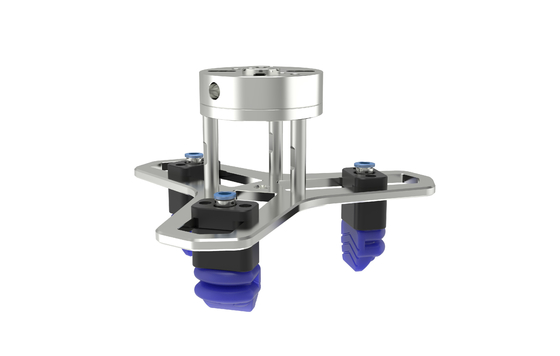
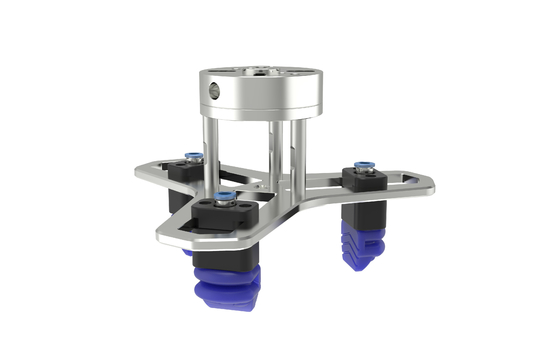
Sfg-fnc3-N3025 + veelzijdigheid + Zachte robottang
Zachte robottang die deeltjes gebruiken om krachten over te brengen
Meeste conventionele flexibele actuators worden gedreven door pneumatische of hydraulische druk en vereisen hermeticity en een grote aandrijvingspomp. Tijdens het grijpen, zou de tangstijfheid met verhoogde misvorming vaak moeten stijgen, die moeilijk om voor conventionele actuators is te bereiken. Dit document stelt zacht-lichaamsactuator voor dat de gebruiksdeeltjes om de tangen te drijven, geen het verzegelen wordt vereist en actuator kan worden gedreven om het gebruiken van slechts een zuiger te buigen om de deeltjes te duwen. In experimenten, toen het volume van ingespoten deeltjes van 1,0 keer de aanvankelijke omvang van actuator in 1,8 keer de aanvankelijke omvang veranderde, de actuator neiging aan 60° met een bijna zevenvoudige verhoging van stijfheid in vergelijking met de begintoestand. Om de haalbaarheid van deze methode te verifiëren, werd een zacht-lichaamstang die uit drie zacht-lichaamsactuators bestaan ontwikkeld. Deze methode verstrekt een belangrijk alternatief voor het ontwerp en de ontwikkeling van flexibele tangen.
| φb | 200 |
| Wn | 30 |
| Dn | 31-142 |
| Pond | 68.2 |
| Lt. | 62.7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| de waaier van de werkstukafmeting | 31-154 |
| lading (g) | 1920 |
| productgewicht (g) | 507 |
| maximum werkdruk | 100kPa |
| het productleven | 300w |
![]()
Contactpersoon: Miss. wang
Tel.: +8618651125686